Dedicated to transcending the physical boundaries of robotic intelligence, Intelligent Space Robotics Team pioneers innovative algorithmic architectures to endow robots with human-like motion control and multimodal interaction capabilities across diverse scenarios. Our research ecosystem spans imitation learning, deep reinforcement learning, humanoid robot dynamic control, dexterous manipulations, and cross-modal environmental perception, driving the transition of robotic technologies from lab environments to industrial, domestic, and service applications.
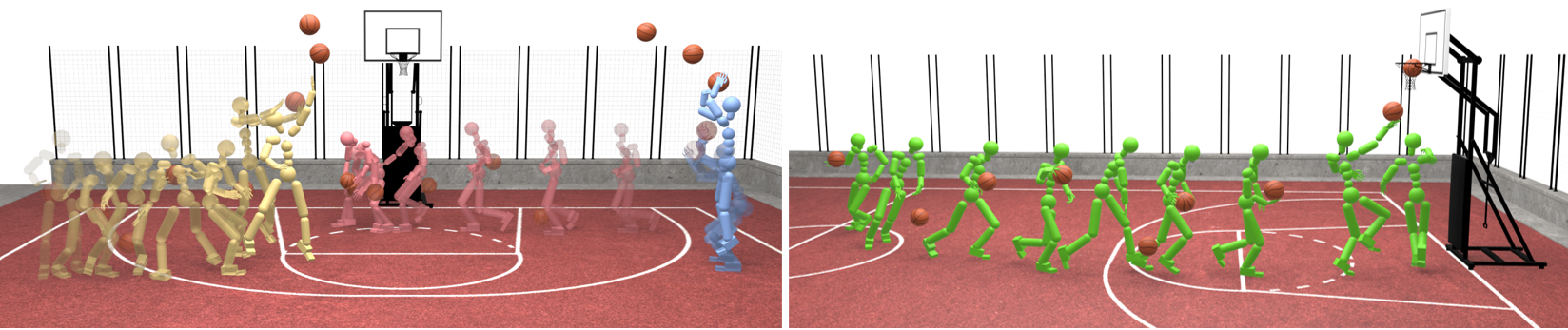
We have pioneered the Human-Object Interaction (HOI) Imitation paradigm, achieving the first-ever comprehensive basketball skill acquisition in simulated humanoid robots. This framework enables holistic mastery of high-dynamic interaction skills - including diversified dribbling, pivoting, rebounding, shooting, and layups - through unified HOI imitation, establishing a new paradigm for humanoid robot skill acquisition. Our breakthroughs empower robots to accomplish long-horizon tasks like sustained autonomous scoring, demonstrating unprecedented behavioral continuity.
Current research focuses on three frontiers: constructing a large-scale robotic skill database supporting thousand-level skill transfer, developing task-agnostic universal manipulation primitives, and creating vision-language-action multimodal foundation models.